Raman spectroscopy – nuclearised
Identification and characterisation of radioactive material and other hazardous substances is an essential requirement for the nuclear industry.
At facilities undergoing decommissioning, there is a great need for improved in-situ analytical capability so that fewer samples have to be transported for laboratory analysis. To achieve this, it is useful to have a wide range of sensors available in order to detect and identify as many potentially hazardous substances as possible.
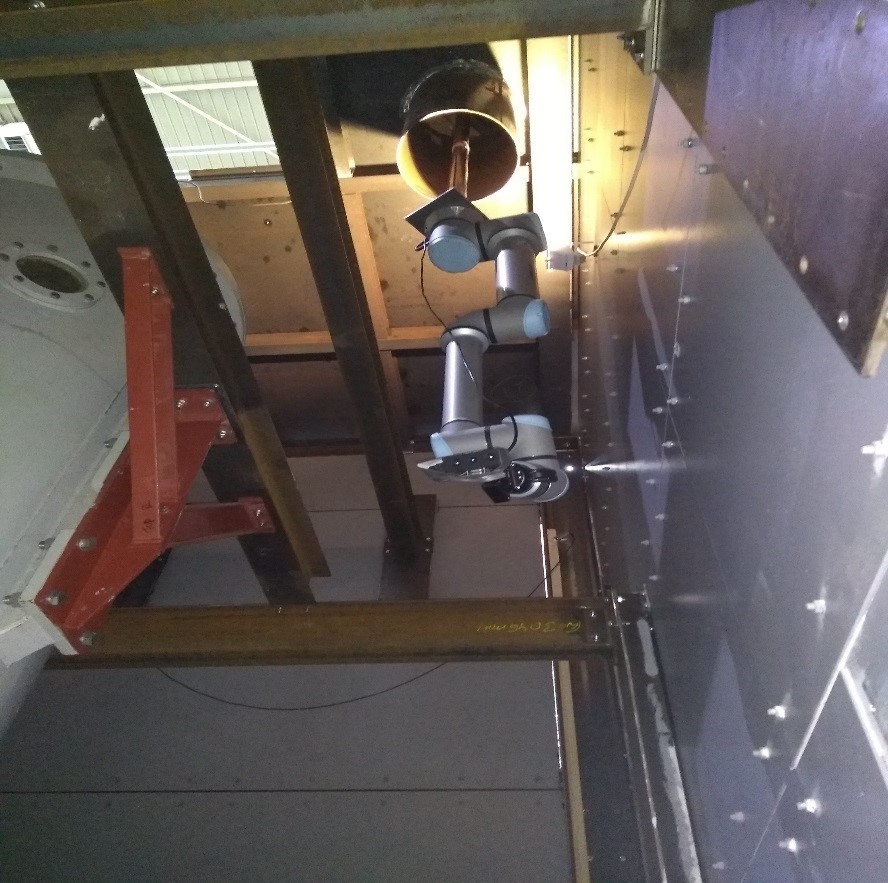
Jacobs, the global technical solutions company, and IS Instruments, a small tech business based in Kent in the UK which specialises in laser sensing technology, have developed a new class of spatial heterodyne Raman spectrometer and taken it from Technology Readiness Level 3 (TRL3) to TRL8. Mounted on a range of delivery platforms, including a robotic arm and a remotely operated vehicle (ROV), the Raman probe can identify key substances of interest to the nuclear industry from a distance of up to three metres.
Raman spectroscopy works by firing a low powered laser at the area of interest; the laser interacts with the substances present which then emit a Raman signal. This signal produces a spectrum which is specific to each substance and can be used to create a chemical fingerprint to identify and quantify the materials present, even if there are many substances mixed together.

Classical radiometric tools such as gamma spectrometry can identify a wide range of radioactive materials. But they cannot easily identify alpha emitters and can struggle to detect low energy gamma emitters in the presence of large quantities of other high energy gamma emitters. Instead of using radiometric means, radioactive materials and other chemical substances can be identified through Raman spectroscopy, but because of the challenging nature of the environment, instruments often cannot be located close to the target substance. So, although Raman spectroscopy is a well-established and effective technology, it has been used very little in the nuclear industry.
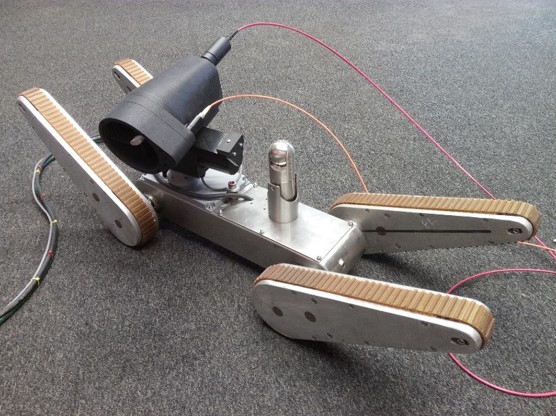
The ROV used was the Jacobs ROV022 high mobility platform, a nuclear-hardened tracked crawler with four independent drive pods that can be rotated allowing the system to climb over obstacles or alter its profile to fit within small spaces. Power and communication were delivered to the system via a trailed umbilical connection. These fibre couplings are used to enable all the sensitive electronics to be sited a considerable distance away from the deployment platform, enabling easier access to restrictive spaces for associated ROVs and reducing the deleterious effects of the hazardous environments often found in nuclear facilities.
The ROV’s removable top plates provide a mounting point for a variety of different instruments varying from manipulator arms to laser scanning systems. The probe was attached to a heavy-duty pan and tilt mechanism fitted to the rear mounting point. A pan and tilt navigation camera mounted to the forward plate was used to both locate and confirm the pointing direction for the instrument. The Raman probe head was connected to the main spectrometer using a 15 metre long, 1mm diameter optical fibre. A shielded fibre was used to transmit the Raman signal from the probe head to the spectrometer. This followed initial testing where it was observed that moderate levels of ambient light were leaking into the unshielded fibre.
The probe head was developed with deployment into potentially radioactive environments in mind. Therefore, the external structure was designed to be easy to decontaminate. Ranging information was provided initially by a commercially available LIDAR system and allowed the focus control mechanism to be accurately positioned to target samples at various stand-off distances from the probe. Repeatability challenges led to a stereo camera system being latterly used to fulfil the same function.
Although compact and low cost, the technology was proven to be able to detect substances of interest to the nuclear industry in less than one minute, up to ranges of three metres. It uses the 3D stereo camera system to both locate possible targets and provide ranging information to guide the focusing position of the Raman probe to maximise the signal.
The system has been tested in a representative environment with observations made of a number of substances including cellulose, uranyl nitrate, mixed organic liquids (tri-butyl phosphate and kerosene) and a thin smear of tri-butyl phosphate on a stainless steel surface.
Mike Wharton
Jacobs
mike.wharton@jacobs.com